Table of Contents >> Show >> Hide
- Why Humanoid Robot Joints Matter So Much
- The LIMS2-AMBIDEX Robot: A Joint Design Worth Studying
- Actuators: The Muscles Behind Humanoid Robot Joints
- Compliant Joints: Why Stiffness Is Not Always Strength
- Hands, Wrists, and the Humanoid Dexterity Problem
- Boston Dynamics Atlas and the Future of Whole-Body Motion
- Agility Robotics Digit: Practical Joints for Real Work
- Robot Joints and Artificial Intelligence: The New Partnership
- What Engineers Can Learn From Human Anatomy
- Where Humanoid Robot Joint Design Is Going Next
- Experience: What These Inspiring Robot Joints Teach Builders, Students, and Curious Humans
- Conclusion
Humanoid robots are easy to admire when they walk, wave, lift, sort, dance, or perform that slightly spooky “I definitely do not have bones” motion. But the real magic is not in the robot’s face, voice, or shiny shell. It is hiding in the joints. Shoulders, wrists, elbows, hips, knees, ankles, and fingers are where engineering stops being a spreadsheet and starts looking suspiciously like anatomy class with a soldering iron.
The phrase “humanoid robot has joints that inspire” captures one of the most fascinating problems in robotics: how do you build a machine that moves with human-like smoothness, strength, balance, and dexterity without making it heavy, fragile, wildly expensive, or dramatic enough to fall over when it picks up a box? The answer is a blend of clever mechanical design, compact actuators, cable-driven systems, compliant joints, artificial intelligence, and a healthy respect for the human body’s annoyingly brilliant engineering.
Why Humanoid Robot Joints Matter So Much
A humanoid robot is not just a walking computer. It is a full-body motion system. Every joint must solve multiple problems at once: range of motion, torque, speed, durability, energy efficiency, safety, and control. That is a lot to ask from a part that usually gets ignored until it squeaks.
Human joints are compact, flexible, shock-absorbing, and coordinated by a nervous system that makes thousands of tiny corrections without asking us to open a settings menu. Robot joints, meanwhile, must recreate some of that performance using motors, sensors, gears, cables, springs, bearings, software, and control algorithms. A weak joint limits payload. A stiff joint can make movement unsafe. A heavy joint makes the whole limb harder to control. A poorly placed actuator turns the arm into a swinging dumbbell with Wi-Fi.
This is why robotics engineers obsess over joint design. The better the joint, the more natural the robot’s movement becomes. The more natural the movement, the more useful the robot becomes in homes, factories, warehouses, hospitals, disaster zones, and research labs.
The LIMS2-AMBIDEX Robot: A Joint Design Worth Studying
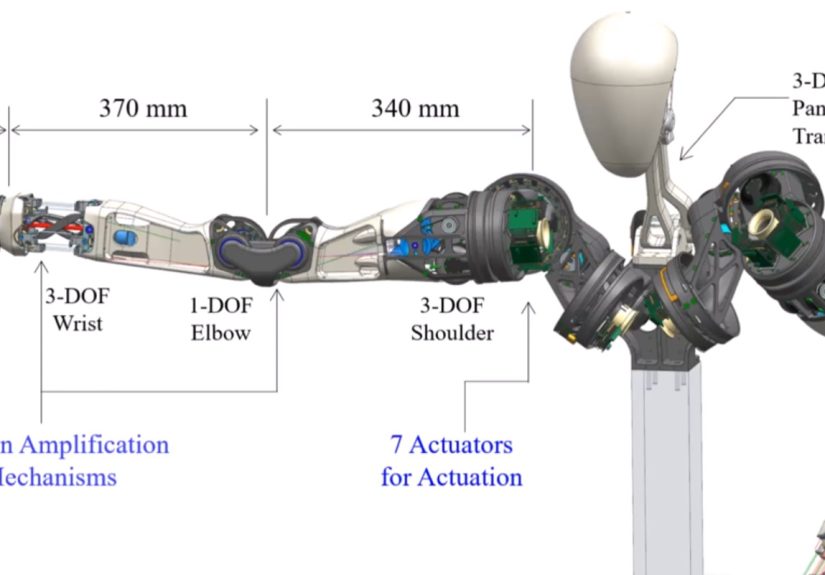
One of the most interesting examples behind this topic is the LIMS2-AMBIDEX humanoid upper-body robot developed by researchers from IRIM Lab at Korea University of Technology and Education. Its design drew attention because it approached robotic arms with a simple but powerful idea: keep the heavy parts near the shoulder and transfer motion through cables and pulleys.
That may sound like a gym machine got into robotics, but the logic is excellent. When heavy motors are placed far down the arm, the limb gains inertia. In plain English, it becomes harder to start, stop, and control. By moving most actuators closer to the shoulder, the robot’s arms can stay lighter and respond more smoothly. The result is a robotic upper body that can perform fast, realistic arm motions without needing oversized motors at every joint.
Seven Degrees of Freedom Per Arm
Each LIMS2-AMBIDEX arm has seven degrees of freedom, roughly matching the flexibility expected from a human-like arm system. The shoulder handles multi-axis motion, the elbow provides bending, and the wrist contributes the fine directional control needed for manipulation. Seven degrees of freedom gives the robot more ways to reach around obstacles, position its hand, and perform gestures that do not look like a refrigerator trying ballet.
The robot’s wrist and elbow mechanisms are especially inspiring. The wrist emulates rolling contact using revolute joints, allowing smooth motion while also letting a drive shaft pass through the center of the mechanism. The elbow uses a rolling double-joint style that supports a wide rotation range. These details matter because a humanoid robot’s arm cannot be just strong; it must be graceful, compact, and predictable.
Actuators: The Muscles Behind Humanoid Robot Joints
In robotics, actuators are the devices that create motion. In a human body, muscles pull bones through tendons. In a humanoid robot, motors, gears, cables, hydraulic systems, pneumatic systems, or elastic components do the work. The actuator is where electrical energy becomes movement, and when actuator design is bad, the robot becomes either too weak, too stiff, too slow, or too likely to audition for a slapstick comedy.
Modern humanoid robots commonly use electric actuators because they are compact, controllable, and increasingly powerful. Boston Dynamics’ newer Atlas robot, for example, represents a major shift toward fully electric humanoid design. Earlier versions of Atlas were famous for hydraulic power, but the electric generation reflects the industry’s push toward cleaner, more product-ready, maintainable systems.
Electric actuators are not automatically perfect. They must deliver high torque without excessive weight. They must resist shock loads when a robot steps, slips, lifts, or catches itself. They must support precise control, especially when the robot interacts with people or objects. That is where gear reduction, torque sensing, thermal design, and software control become as important as the motor itself.
Compliant Joints: Why Stiffness Is Not Always Strength
For decades, industrial robots were designed to be extremely stiff. That works beautifully when a robot is bolted to a factory floor and repeats the same motion all day. Humanoid robots have a harder job. They move through unpredictable environments, touch objects of different shapes, and may work near humans. In that world, too much stiffness can be a problem.
Compliant joints introduce controlled flexibility. Series elastic actuators, for instance, place an elastic element between the motor and the load. This allows the joint to absorb impact, estimate force, and interact more safely with the world. In a walking robot, compliance can help protect the mechanism when the foot lands slightly earlier or later than expected. In a robotic arm, compliance can make contact less abrupt when the hand touches an object.
NASA’s Valkyrie humanoid robot and many academic humanoid platforms have explored series elastic actuation because it offers a practical way to combine power with force sensitivity. The big challenge is control. A compliant joint is safer and more natural, but it also adds complexity. The robot has to understand not just where the joint is, but how much force is passing through it.
Hands, Wrists, and the Humanoid Dexterity Problem
If legs are the drama queens of humanoid robotics, hands are the perfectionists. A robot can walk impressively and still fail at opening a drawer, folding fabric, turning a knob, or picking up a soft object. Human hands combine joints, tendons, skin, tactile sensing, and unconscious control. Copying that system is difficult enough to make even seasoned engineers stare into the distance like they just remembered calculus.
Modern humanoid developers are paying close attention to hands and wrists. Figure AI’s Figure 03 introduced a redesigned hand and sensory suite intended to support its Helix AI system. Its newer autonomy architecture emphasizes full-body joint state, proprioception, tactile input, and joint-level commands. That matters because dexterous manipulation is not just a hand problem. The wrist, elbow, shoulder, torso, and even legs all contribute to stable, useful motion.
Robotic hands also force designers to make trade-offs. More fingers, more joints, and more actuators can improve dexterity, but they also increase cost, weight, fragility, and control difficulty. Sometimes a three-fingered gripper may perform a task better than a five-fingered hand. Sometimes the secret is not more fingers but a better wrist. In robotics, “more human-like” is not always the same as “more useful.”
Boston Dynamics Atlas and the Future of Whole-Body Motion
Boston Dynamics’ Atlas is one of the best-known humanoid robots because it shows how full-body motion can look when mechanical engineering and control software grow up together. The latest electric Atlas is designed for industrial work, including material handling and automation tasks. Its movements are not limited to copying human posture. In fact, one of the most interesting things about Atlas is that it can move in ways humans cannot comfortably imitate.
That is an important shift. Early humanoid robots were often judged by how closely they resembled people. Today, engineers increasingly ask a better question: what body shape and joint layout help the robot do useful work? A humanoid form is valuable because human environments are built around human proportions. Doors, shelves, stairs, tools, workstations, and handles all assume a body with arms, legs, and hands. But within that human-like form, robot joints can exceed human limits.
A robot shoulder does not need to complain about sleeping wrong. A robotic wrist can rotate in a way that would send a human to urgent care. A robot torso can be optimized for balance and reach rather than elegance. The best humanoid robots may look human enough to use our world, while moving robotically enough to outperform us in specific tasks.
Agility Robotics Digit: Practical Joints for Real Work
Agility Robotics’ Digit shows another side of humanoid joint design: practicality. Digit is built for warehouses, logistics, and manufacturing environments where the task is not to impress a conference audience but to move items reliably. Its legs, torso, and arms are designed around mobility, balance, and repetitive handling tasks.
Digit’s design reminds us that inspiration does not always mean complexity. Sometimes the inspiring joint is the one that survives a long shift. In commercial robotics, reliability is glamorous. A joint that works for thousands of cycles, stays cool, handles load, and remains serviceable may not generate viral videos, but it creates real value.
This is where humanoid robots are heading: away from one-off demonstrations and toward durable systems that can be deployed, maintained, updated, and scaled. Joint design is central to that transition. Without dependable joints, even the smartest AI model is just a very confident brain trapped in an expensive mannequin.
Robot Joints and Artificial Intelligence: The New Partnership
Mechanical design and artificial intelligence are no longer separate conversations. A humanoid robot’s AI must understand the body it controls. It needs joint state data, camera input, tactile feedback, force estimates, and balance information. The robot must coordinate all of this in real time, often at high frequency, to move safely and effectively.
Figure AI’s Helix work is a clear example of this direction. The system connects perception with joint-level control, turning sensory data into full-body actions. This approach reflects a broader robotics trend: instead of programming every movement by hand, developers are training systems to generalize from data, simulation, and real-world feedback.
But AI cannot magically fix poor hardware. A robot with weak joints, sloppy transmissions, or unreliable sensors will still struggle. Great humanoid robotics happens when the physical body and the control system are designed together. The joint must be capable of smooth forceful motion, and the software must know how to use that capability intelligently.
What Engineers Can Learn From Human Anatomy
Human anatomy offers countless lessons for robot design. Our muscles are not placed randomly. Many are located in ways that reduce moving mass and improve leverage. Tendons transfer force across joints. Ligaments guide motion. Cartilage reduces friction. The wrist balances compactness with dexterity. The shoulder sacrifices some stability to gain huge range of motion. The knee is not a simple hinge; it rolls, slides, and stabilizes under load.
Humanoid robot joints often borrow these ideas without copying them exactly. Cable-driven robotic arms imitate tendon routing. Series elastic actuators imitate the shock absorption of muscle-tendon systems. Rolling contact mechanisms imitate natural joint motion. Soft covers and compliant structures help robots work safely near people.
The point is not to build a metal human. The point is to understand why biology works and then translate those principles into manufacturable, controllable machines. Nature is a brilliant engineer, but it also had millions of years and no quarterly budget meeting. Robotics teams must be inspired by biology while still respecting cost, assembly, maintenance, and production realities.
Where Humanoid Robot Joint Design Is Going Next
The next generation of humanoid robots will likely bring several improvements in joint technology. First, actuators will become more integrated. Instead of separate motors, gears, sensors, and controllers scattered across the robot, more joints will use compact modules that combine these elements into serviceable units.
Second, robots will gain better force sensing. Knowing joint position is not enough. A useful humanoid must understand contact, load, slip, and resistance. This is essential for tasks like carrying groceries, handling tools, assisting people, or sorting irregular objects.
Third, wrists and hands will become a major battleground. Walking is still hard, but manipulation is where many commercial promises either succeed or quietly walk into a broom closet. Better wrists, tactile fingers, tendon-driven hands, and robust grasp planning will determine whether humanoids can move beyond controlled demos.
Finally, joint design will become more manufacturable. A beautiful lab prototype is wonderful, but a commercial robot needs parts that can be built repeatedly, repaired quickly, and tested consistently. The most inspiring joint may not be the weirdest one. It may be the one that works every day and does not require a PhD to replace.
Experience: What These Inspiring Robot Joints Teach Builders, Students, and Curious Humans
Watching a humanoid robot move can be exciting, but studying its joints is where the deeper appreciation begins. Anyone who has built even a simple robot arm knows the feeling: the first sketch looks easy, the first prototype looks heroic, and the first test makes a noise that encourages personal growth. A joint that seemed simple on paper suddenly has backlash, friction, wiring problems, heat issues, and a strong desire to loosen itself at the worst possible time.
That experience is exactly why robots like LIMS2-AMBIDEX are so inspiring. They show that clever layout can solve problems that brute force cannot. Instead of putting every motor directly at the joint, the design moves weight toward the shoulder and transfers motion through cables and pulleys. For students and makers, this is a powerful lesson: performance is not only about buying a bigger motor. Sometimes it is about placing the motor somewhere smarter.
Another lesson is that range of motion must be designed carefully. A wrist that bends beautifully in one direction but locks up in another is not very useful. A robot elbow that cannot reach a natural position will make every task awkward. When builders experiment with 3D-printed joints, tendon routing, or servo-driven arms, they quickly discover that geometry is destiny. The angle of a pulley, the location of a pivot, and the length of a link can decide whether the motion feels smooth or fights itself like a shopping cart with one bad wheel.
Humanoid joints also teach patience. Robots rarely become graceful in the first version. A joint may need stronger bearings, better cable tension, improved sensors, softer stops, or a redesigned housing. That process can be frustrating, but it is the heart of engineering. Every failed movement provides information. Every wobble is a tiny mechanical email saying, “Please revise your assumptions.”
For educators, humanoid joints are a perfect teaching tool because they connect physics, biology, design, coding, and problem-solving. Students can compare a human wrist to a robotic wrist, study torque with a simple arm, or explore why moving mass farther from the shoulder makes control harder. Suddenly, abstract ideas like inertia, leverage, compliance, and feedback become visible. The robot turns the classroom into a laboratory, and nobody has to pretend that pulleys are boring.
For everyday observers, these joints offer a bigger message. The future of robotics will not arrive only through smarter chatbots or faster processors. It will arrive through better bodies: safer hands, stronger knees, lighter arms, quieter actuators, and joints that can survive the messy real world. The most inspiring humanoid robot is not the one that merely looks like us. It is the one that helps us understand movement itself.
Conclusion
Humanoid robot joints are where imagination becomes engineering. They turn code into motion, motors into muscle, and mechanical parts into something that can reach, balance, lift, gesture, and interact with the world. From LIMS2-AMBIDEX’s cable-driven arms and elegant wrist mechanism to Boston Dynamics’ electric Atlas, Figure AI’s full-body control ambitions, Agility Robotics’ practical Digit platform, and research into compliant actuators, one theme is clear: the future of humanoid robotics depends on joints that are compact, strong, safe, intelligent, and surprisingly graceful.
So yes, a humanoid robot can have joints that inspire. Not because they perfectly imitate humans, but because they remind us that movement is one of the hardest and most beautiful problems in engineering. A great robot joint is not just a hinge. It is a negotiation between strength and softness, speed and safety, biology and machinery. And when that negotiation works, the robot does not merely move. It makes us lean closer and think, “Okay, that was clever.”